
1/5
2026/6/24 · 12:42
Aether AI:机器人要学会「为什么」
量子位单篇文章图片笔记:Aether AI 把具身智能的世界模型路线押到「因果」上,用因果变量、因果结构和动力学解释机器人为什么需要从预测走向干预。

图集
原文来自量子位,发布时间为 2026-06-24 12:00(北京时间)。这组图只做单篇文章笔记,不把公众号原文里的创业公司判断扩展成独立核验结论。
这 5 张图讲什么
- 因果世界模型:Aether AI 把物理 AI 的关键问题放到「为什么会这样演化」上,而不是只预测下一帧或下一步。1
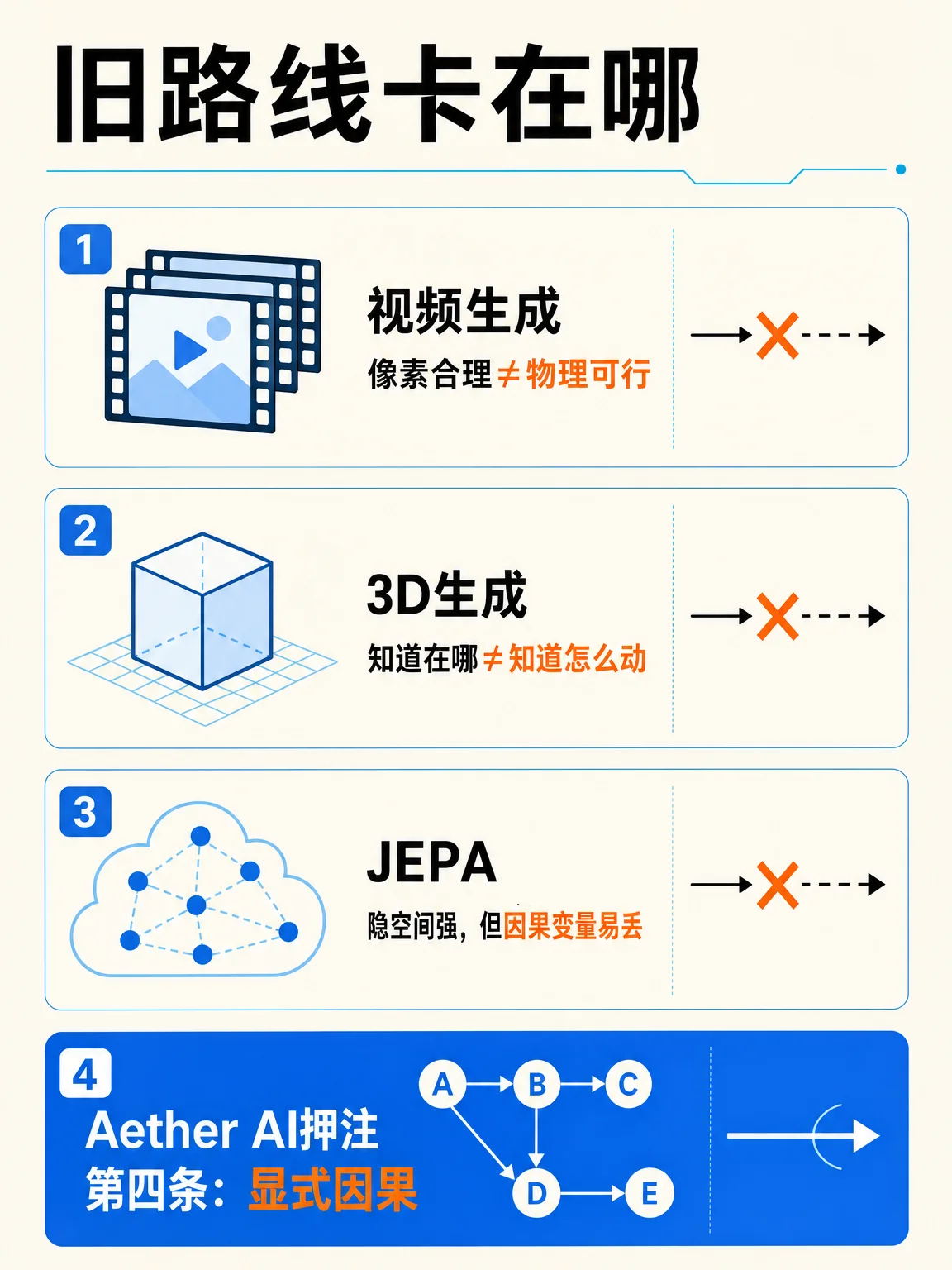
- 旧路线的盲区:原文把视频生成、3D 生成和 JEPA 路线分别归纳为像素相关性、静态结构和隐空间状态转移,并指出它们没有显式拆出因果变量与因果结构。1
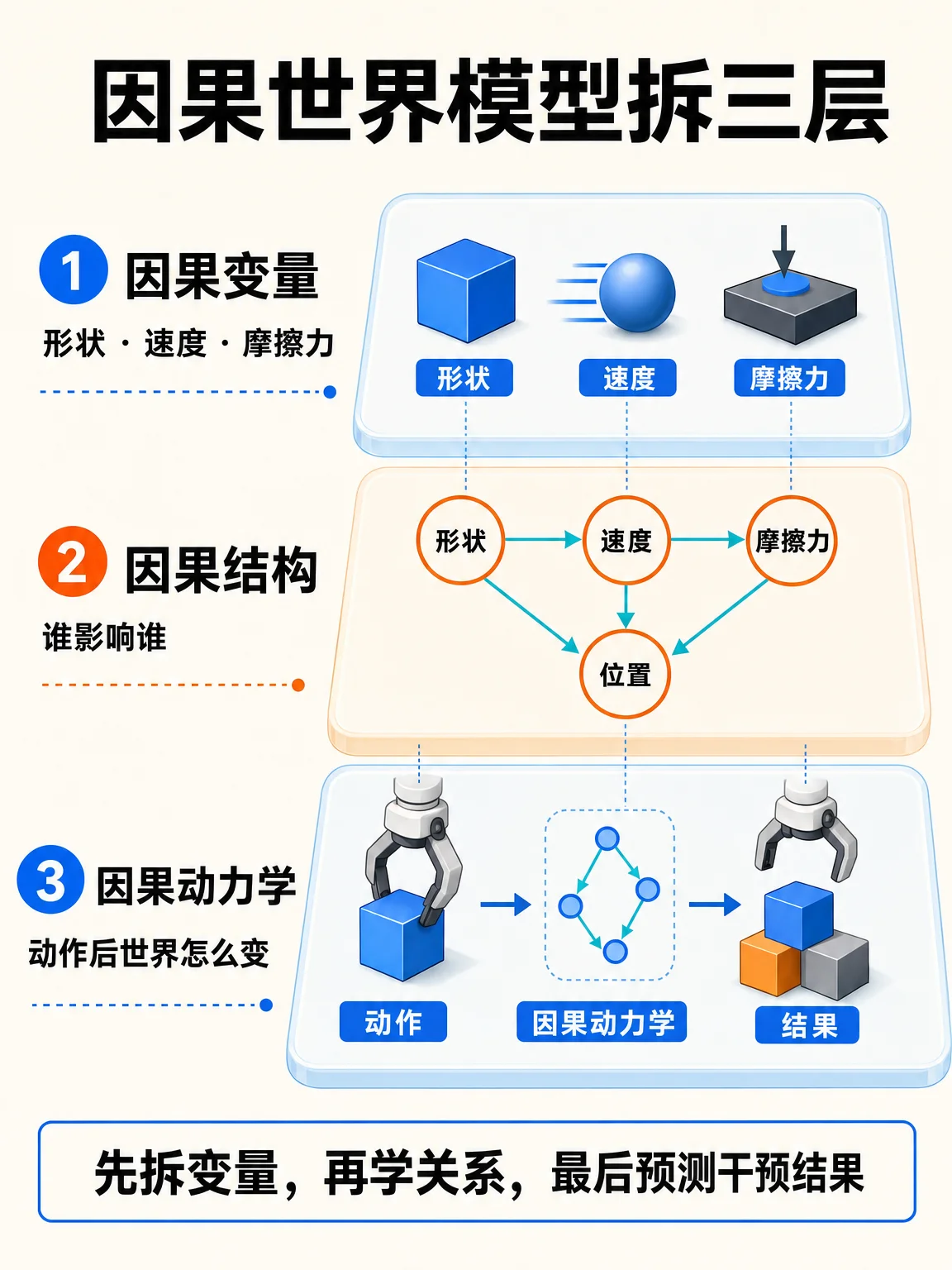
- 三层机制:因果世界模型被拆成因果变量提取、因果结构学习和因果动力学建模,目标是让机器人理解动作如何改变世界状态。1
- 为什么机器人更需要因果:原文称,机器人不是只输出文字,而是会干预物理世界;Aether AI 内部数据称其因果世界模型在机器人操作任务上带来 25%-50% 成功率提升和 5-10 倍样本效率提升。1
- Aether AI 的押注:原文称 Aether AI 完成 2000 万美元种子轮融资,数据组合约为 80% 模拟、第一视角和公开视频数据,加上约 20% 遥操数据,并把系统架构描述为 Transformer、因果世界模型 / 模块化架构和 Agent 系统。1
读完留下的问题
这条路线现在最需要被验证的,不是「因果」这个词听起来够不够新,而是它能不能在真实机器人任务里持续换来可量化的泛化能力、长程任务能力和数据效率。原文也把这点放在了最后的分水岭上。1

评论
登录后可发表评论。