

1/5
2026. 6. 24. · 07:42
Momenta:物理 AI 开始上车
新智元单篇文章图片笔记:Momenta 通过港交所聆讯后,R7 世界模型、90 万辆量产车队和自动驾驶量产场景被放进「物理世界的 Anthropic」叙事里重新理解。

갤러리
这套图片笔记来自新智元文章《刚刚,物理世界的 Anthropic 现身!团队来自中国》。原文把 Momenta 通过港交所聆讯、R7 世界模型交付、90 万辆量产车队与自动驾驶量产场景放在同一条线索里看:世界模型不只生成视频,也在尝试预测下一帧、仿真极端场景,再用强化学习形成驾驶策略。1
本组 5 张卡片依次拆解:
- 原文为什么把 Momenta 放进「物理世界的 Anthropic」叙事。
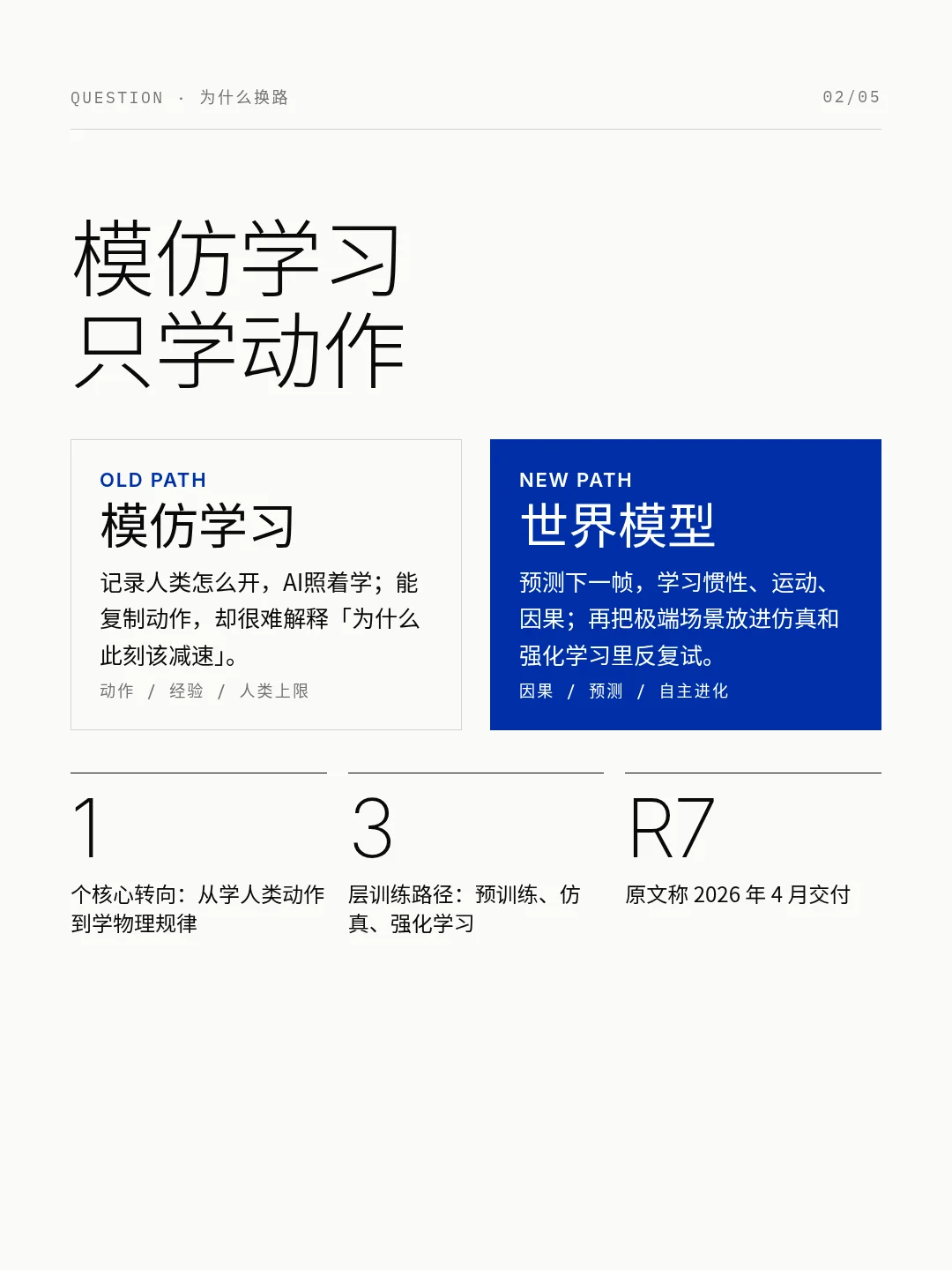
- 自动驾驶路线从模仿学习转向世界模型,差别在「照着开」和「理解物理因果」。1
- R7 的三层训练路径:预训练、仿真、强化学习。1
- 原文给出的量产数据和四个场景:乘用车 L2++、Robotaxi、Robovan、Robotruck。1
- 这篇文章真正想讨论的边界:自动驾驶安全验证不像代码单测,仍要靠真实里程让概率收敛。
原文发布时间:2026-06-23 14:02:31(北京时间)。

댓글
로그인하면 댓글을 작성할 수 있습니다.