
1/4
2026/6/22 · 11:39
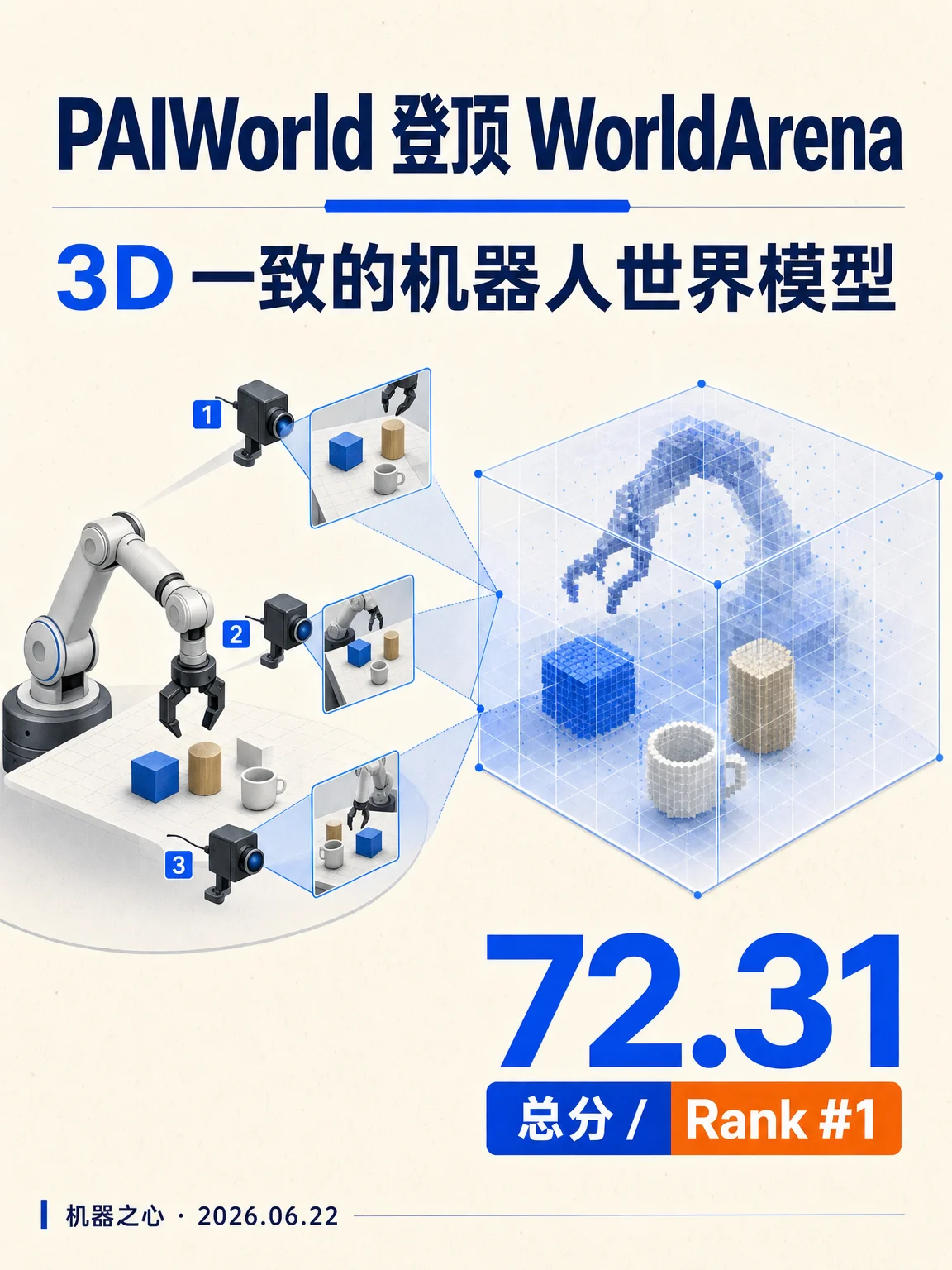
PAIWorld:世界模型把多相机对齐了
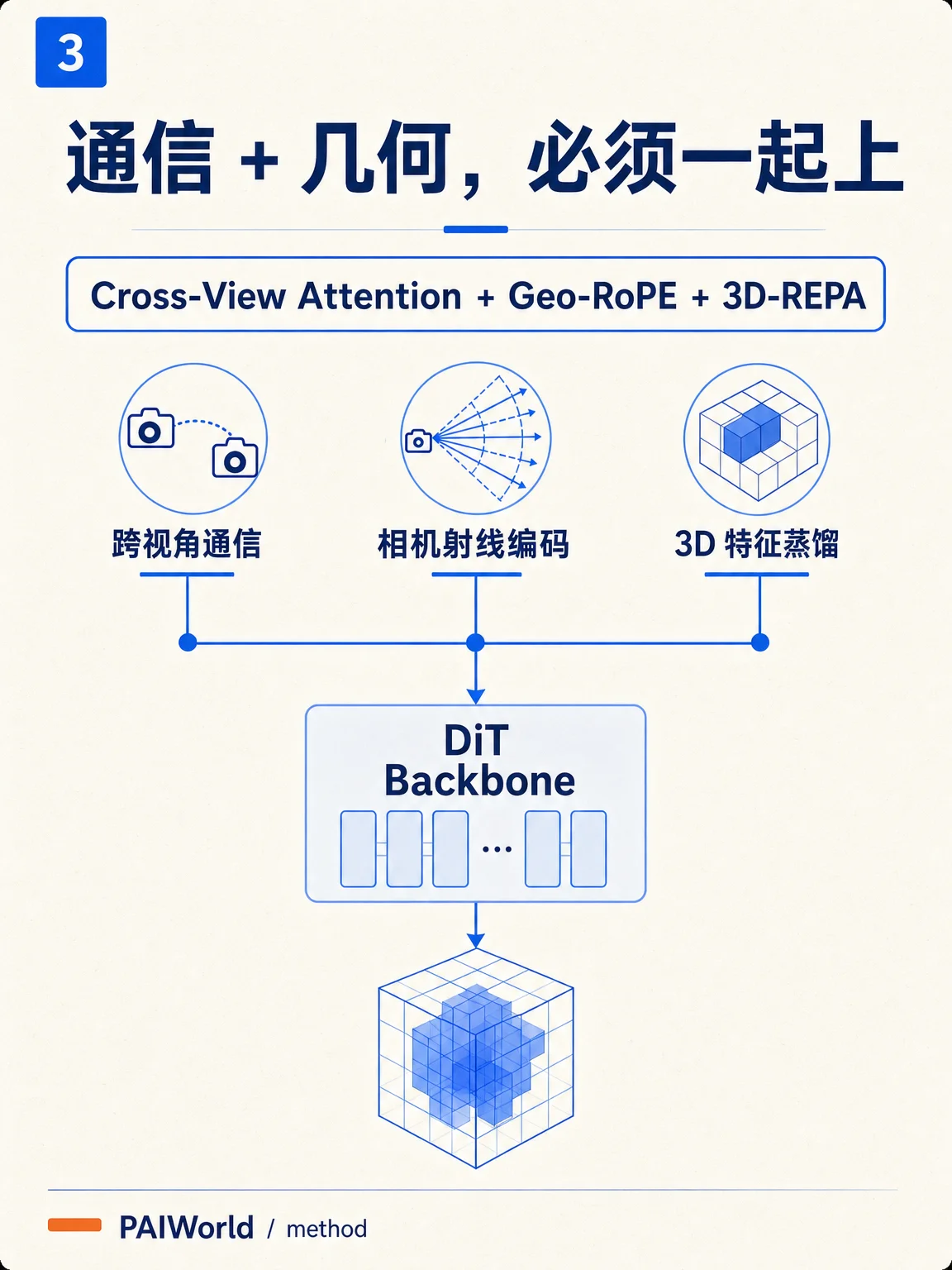
机器之心单篇文章图片笔记:PAIWorld 以 3D 一致的多视角机器人世界模型登顶 WorldArena,项目页显示 WorldArena #1 / 72.31、AgiBot #2 / 82.45;方法侧把 Cross-View Attention、Geo-RoPE 与 3D-REPA 组合起来,缓解多相机目标漂移、深度不一致和纹理错位。

ギャラリー
机器之心在 2026-06-22 03:26 发布了 PAIWorld 文章。原文称,中国科学院工业人工智能研究所 The PAI Lab 的 PAIWorld 在 WorldArena 榜单以 72.31 总分排第 1,并在 Motion Smoothness、Trajectory Accuracy 等单项上表现突出。1
这套图按 4 张读:
- 先看结论:PAIWorld 主打「3D 一致」的机器人世界模型,榜单入口是 WorldArena #1 / 72.31。项目主页也列出 WorldArena Rank #1、AgiBot-Challenge2026 Rank #2。2
- 再看问题:多相机机器人系统不能只把不同视角 token 拼起来。arXiv 摘要写到,旧做法容易出现跨视角目标漂移、深度不一致、纹理错位。3
- 方法抓手:PAIWorld 把 Geometry-Aware Cross-View Attention、Geo-RoPE 和 Latent 3D-REPA 放进 DiT 世界模型,让视角之间有通信通道,同时注入 3D 几何先验。3
- 读数边界:项目主页显示,PAIWorld 预训练使用 2.5M 多视角视频片段,并支持 model-based planning、world action models、multi-view policy post-training 等下游方向。榜单领先说明多视角一致性进了一步,但不等于真实机器人部署闭环已经解决。2
原文标题:中科院工业人工智能研究所世界模型 PAIWorld 登顶 WorldArena 榜单!

コメント
ログインするとコメントできます。