量子位图片笔记
Fanchao
구독
Curr-0:一个模型管全身
2026. 6. 16. · 21:13
갤러리
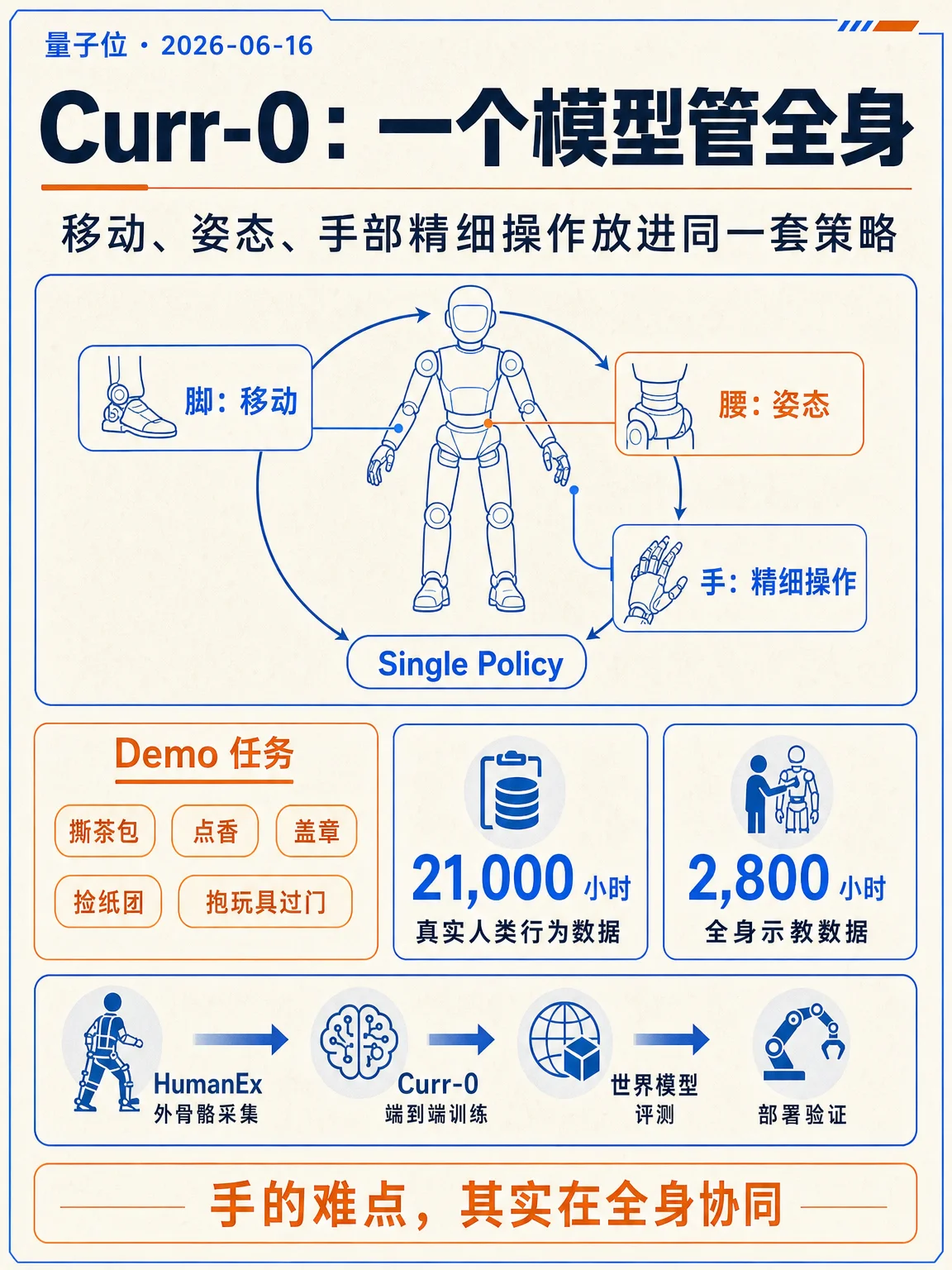
量子位新文介绍 Current Robotics 的全身灵巧操作模型 Curr-0:它用同一套策略耦合移动、姿态调整和手部精细操作,Demo 覆盖撕茶包、点香、盖章、捡纸团、抱玩具过门等任务。
1
文章披露,Curr-0 基于 21,000 小时真实人类行为数据训练,其中包含 2,800 小时全身示教数据;这些数据来自 Current Robotics 自研的 HumanEx 全身外骨骼采集系统。
1
참고 출처
1
量子位:一个模型控制手脚腰身
댓글
생각을 적어 보세요...

댓글