

1/5

Curr-0 不再走走停停:人形机器人把身体合成一个闭环
2026. 6. 18. · 17:57
갤러리
Curr-0 不再走走停停:人形机器人开始把身体当成一个整体
来源:机器之心 2026-06-18 09:10 发布《人形机器人不再「走走停停」:Current Robotics 发布全身灵巧操作模型 Curr-0》。1 本期同时补读了 Current Robotics 的技术博客,用于核对模型、数据与世界模型描述。2
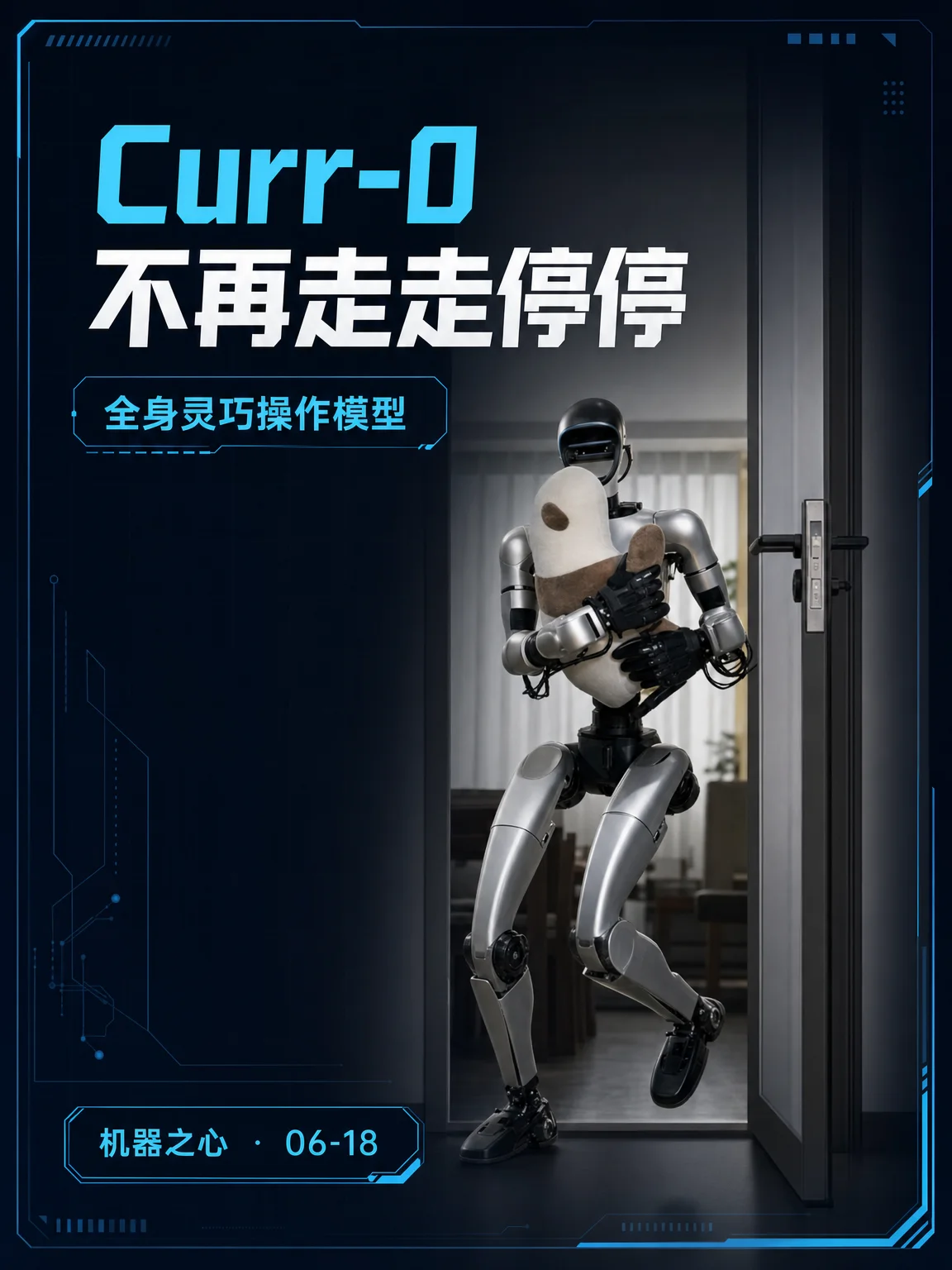
这组图只讲一个变化:Curr-0 不是把「走到目标位置」和「伸手操作」拼起来,而是把移动、姿态、手部接触放进同一个闭环策略里。官方技术博客称,Curr-0 运行在 70+ 自由度人形机器人本体上,并用单一策略展示撕茶包、点香、文件盖章、清理桌面垃圾、抱玩具穿门放篮等任务。2
逐图速读
- 封面:Curr-0 的核心卖点是「不再走走停停」——人形机器人在移动中完成精细操作。1
- 为什么不能拆成两步:站姿影响抓取范围,躯干影响可达性,足底接触决定平衡,手部接触还会反过来改变身体后续动作;所以移动和操作必须耦合。2
- 数据底座:机器之心与 Current Robotics 均提到,Curr-0 使用 21,000 小时真实人类行为数据,其中包含 2,800 小时全身示教数据;HumanEx 的意义在于把数据规模从「机器人部署小时」转向「人类任务小时」。1 2
- 三层系统:官方博客把 Curr-0 拆成 System 2(理解任务与视觉语言处理)、System 1(全身运动与稳定)、System 0(手部与物体的灵巧接触),目标是把语言、感知和机器人状态转成协调动作。2
- 世界模型闭环:团队还在构建视觉、本体感知、力觉/触觉等多模态世界模型,用于策略评测、部署前验证,以及 Human-in-the-World-Model 式的人类介入修正。2
댓글